
How one classroom made soccer playing robots.
In this guest blog post, we share the classroom experiences of an elementary school using the GoPiGo. Jeff Dahl explains how and why his classroom of young engineers built their own soccer-playing robots with the GoPiGo and Raspberry Pi.
Jeff is a technology teacher at Croswell-Lenxington Schools in Michigan. He teaches technology classes for 2nd, 3rd and 4th Grades.

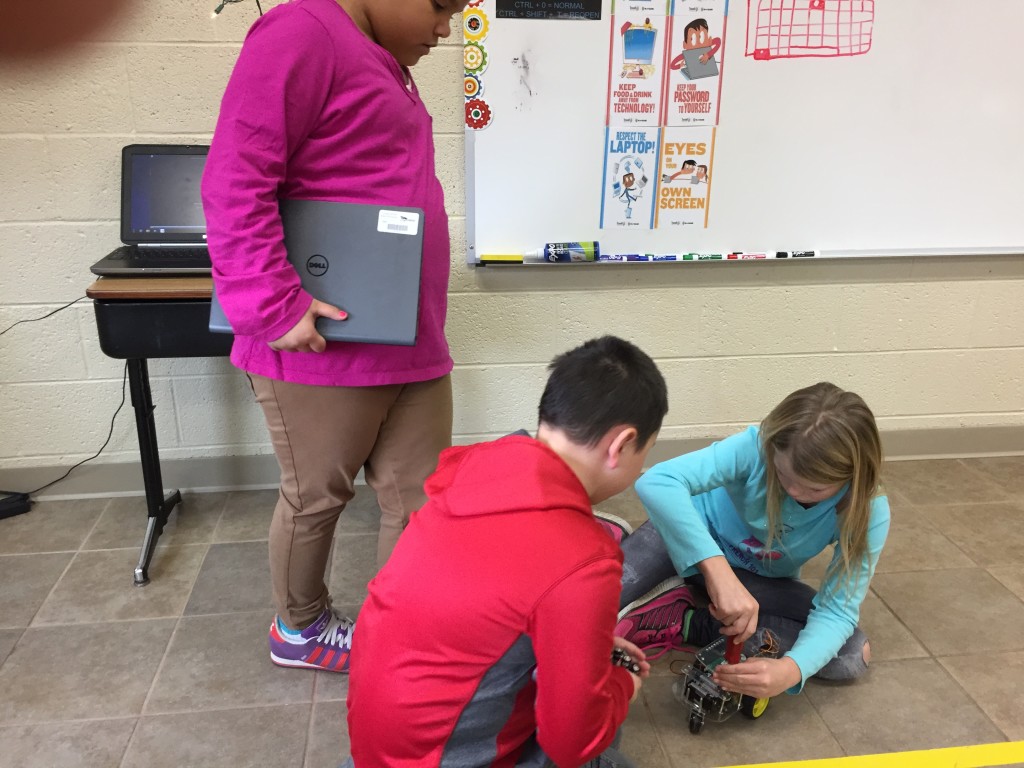
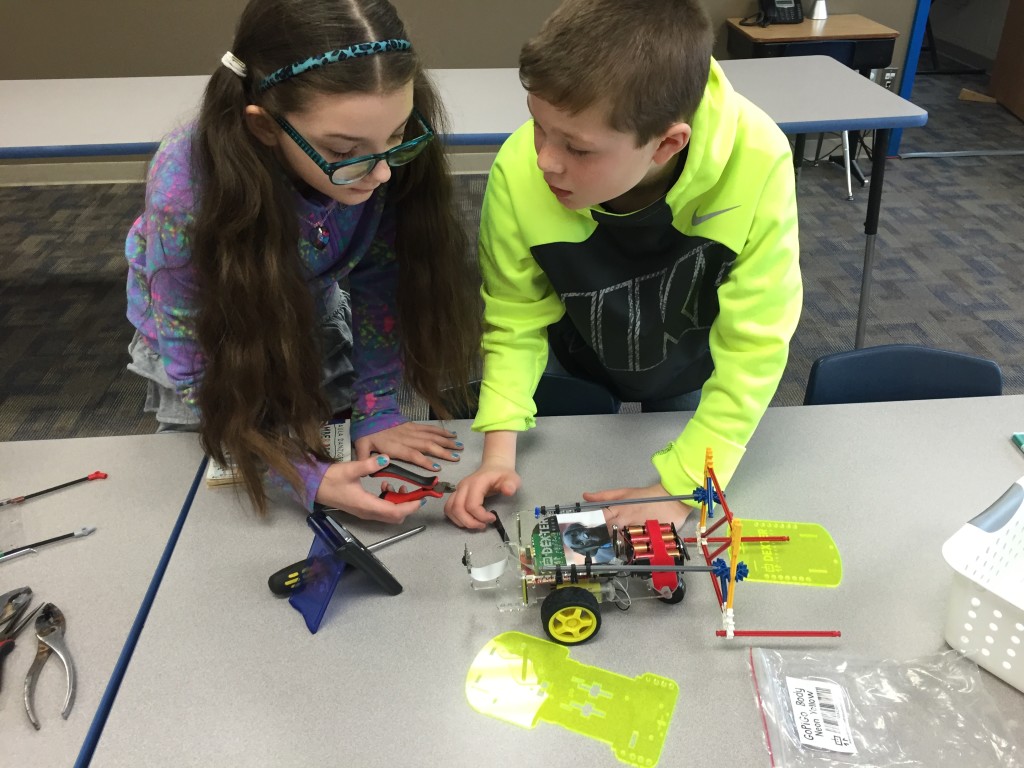
Madison and Kelsey hacking a sensor mount to work with a Raspberry Pi camera.

Jeff Writes:
None of us could have predicted the overwhelming popularity of the Raspberry Pi when Eben Upton introduced his solution to improving programming skills and hardware understanding. The number of fun and useful projects based on this tiny computer grows every day. Even very young people are using the Raspberry Pi to help realize their dreams.


. . . the first question was, “Can we build a robot?”
I teach technology to 7-10 year olds for Croswell-Lexington Community Schools. When I brought the Raspberry Pi into class, at the beginning of the year, the first question was, “Can we build a robot?”
Within two weeks we had a functioning robot and now my students are sure they could do anything. They really wanted to build another ‘bot. Then the idea of playing soccer with robots (fall is soccer season for us) soon followed and we had a challenge to achieve.
Dexter Industries provided a surprisingly easy and, as we are discovering, versatile robot platform that is accessible financially and meets the requirement of technical adeptness.

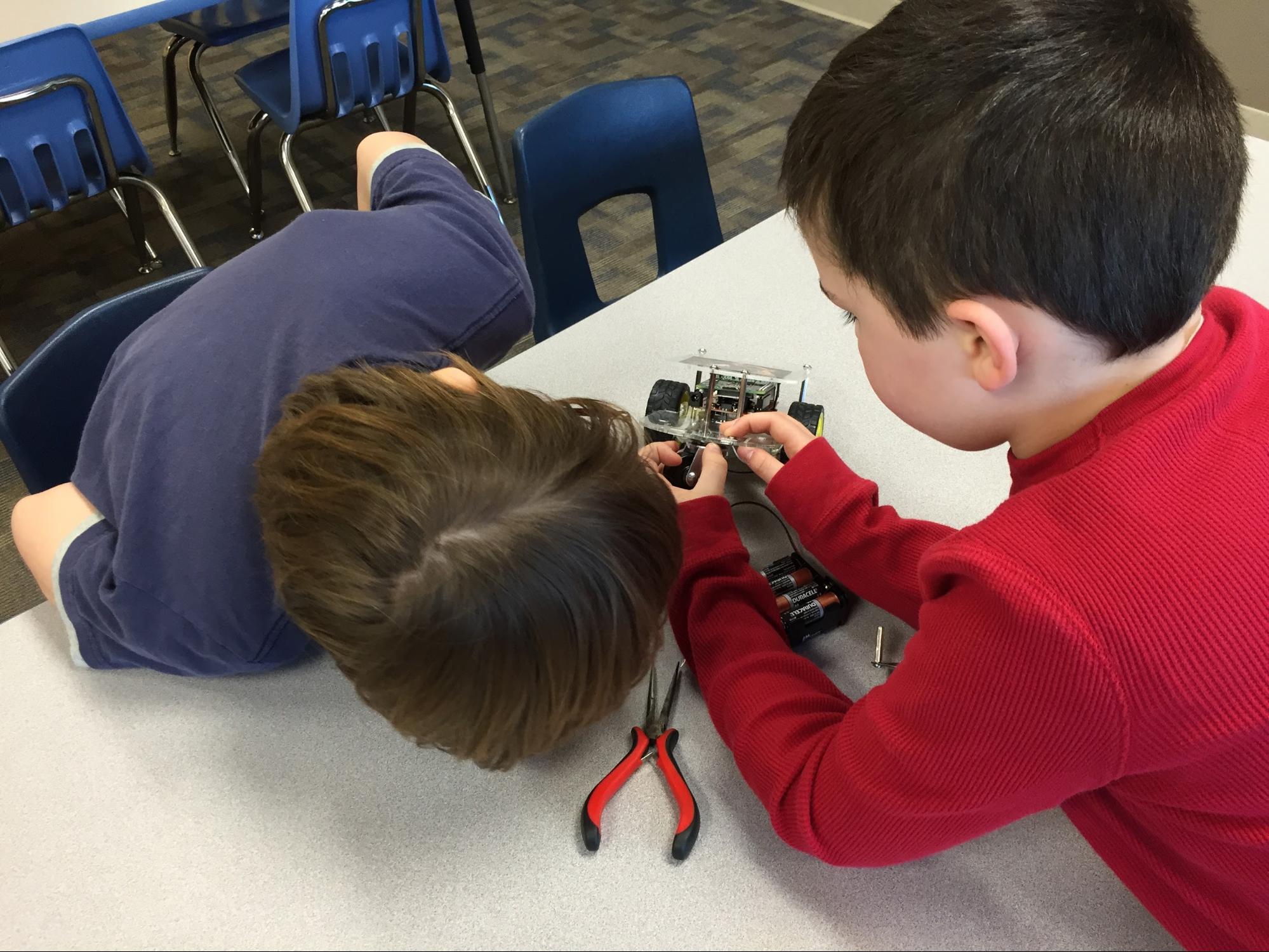
Landon and Brady installing the new caster on the GoPiGo.
Hardware Required
- Raspberry Pi.
- GoPiGo 2 Robot Kit.
- Raspberry pi camera (optional).
- SD Card.
- WiFi Dongle.
- Commercial construction toys (Legos/K’nex).
- Sensor mounts for Camera or Ultrasonic Sensors.
- Soccer themed beach ball.
First Steps
We first constructed the GoPiGo following the videos available on the Dexter Industries web site. The OS for the Raspberry Pi is a custom version of Raspbian, called Raspbian for Robots and also includes project specific examples for the GoPiGo and other robots available through Dexter Industries.
Next we connected to the GoPiGo via ethernet cable to configure the wifi.
At this point we were able to access the Raspberry Pi via wifi through a browser, which was great because it didn’t require us to download any special software.
We chose to use the visual “block” coding language Scratch to control our ‘bots. Python can also be used depending on your programing skill level and specific desires for final product.
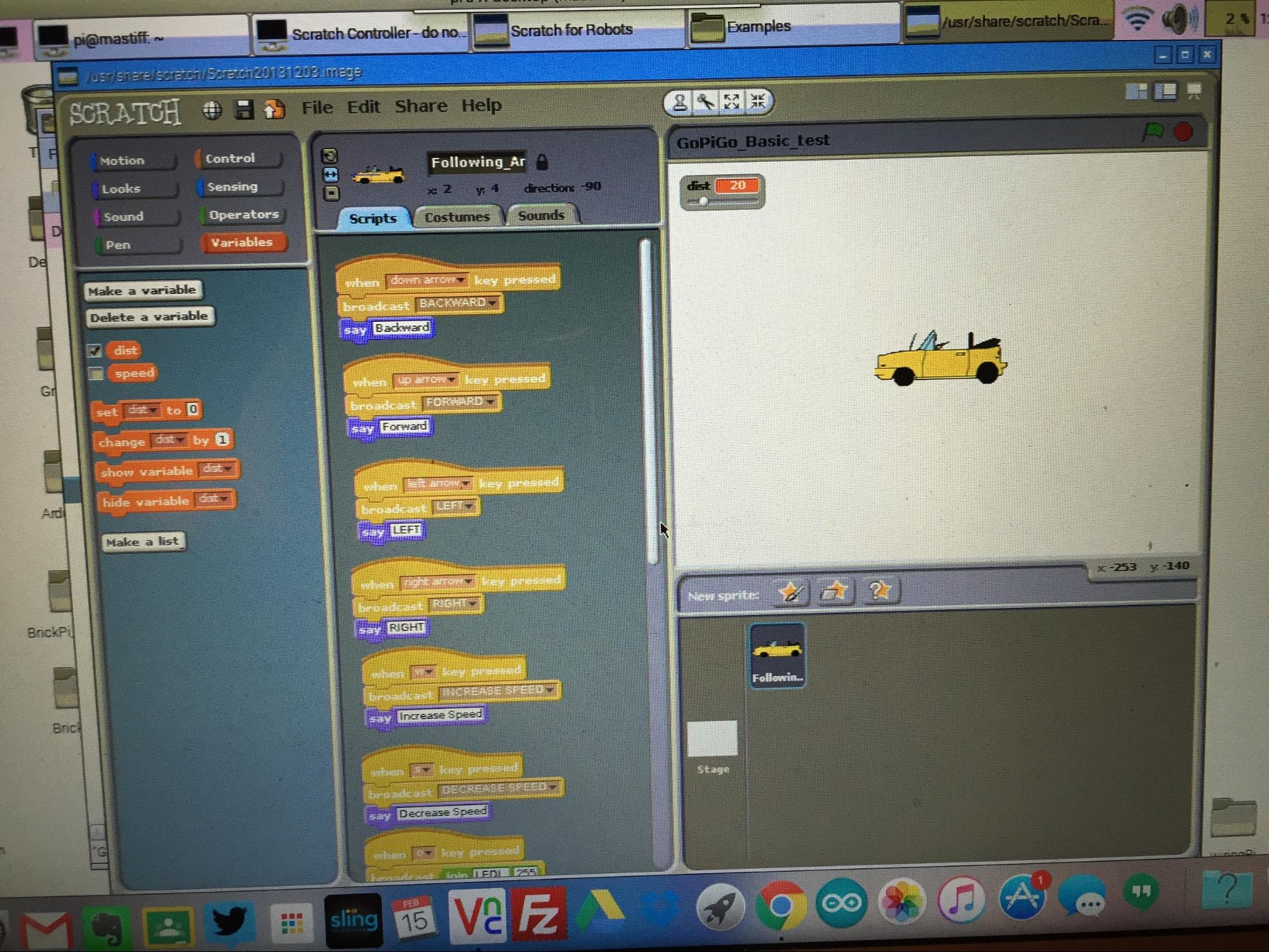
Using Scratch on the GoPiGo.
We chose to use the visual “block” coding language Scratch to control our ‘bots.
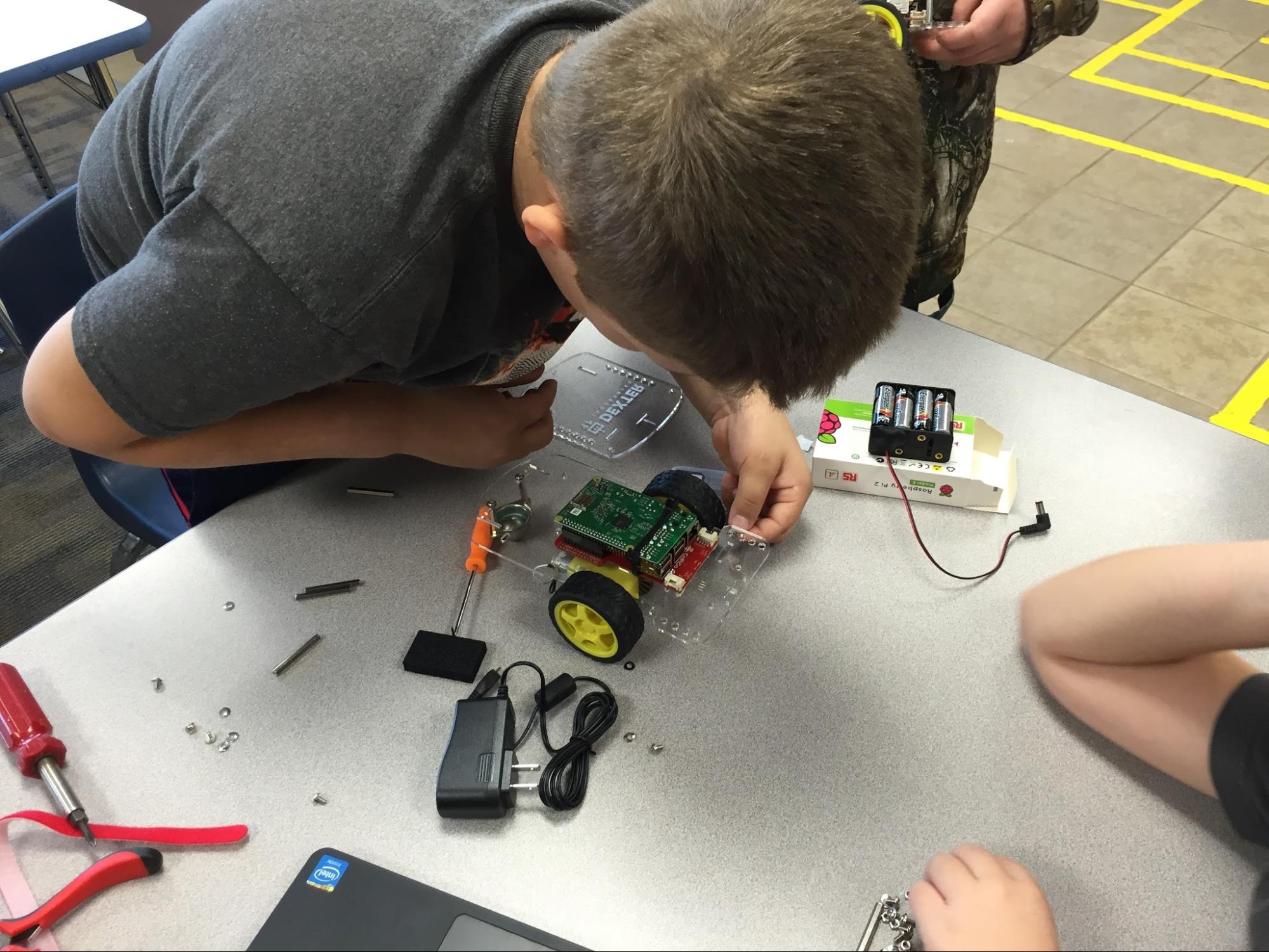
Assembling the GOPIGO 2 with help from the Dexter Industries website.

Landon and Riley attaching the new caster wheel
Modifications
At this point we began tackling the engineering challenges. The non-drive roller (caster wheel) that is the rear wheel of the GPG was getting stuck in our tile floor. We saw other users add rubber bands around the wheels for additional traction. This lead us to develop our own hacks. We discussed solutions and decided to buy a rotating 1 ½ inch furniture caster from Amazon.
At this point we began tackling the engineering challenges.
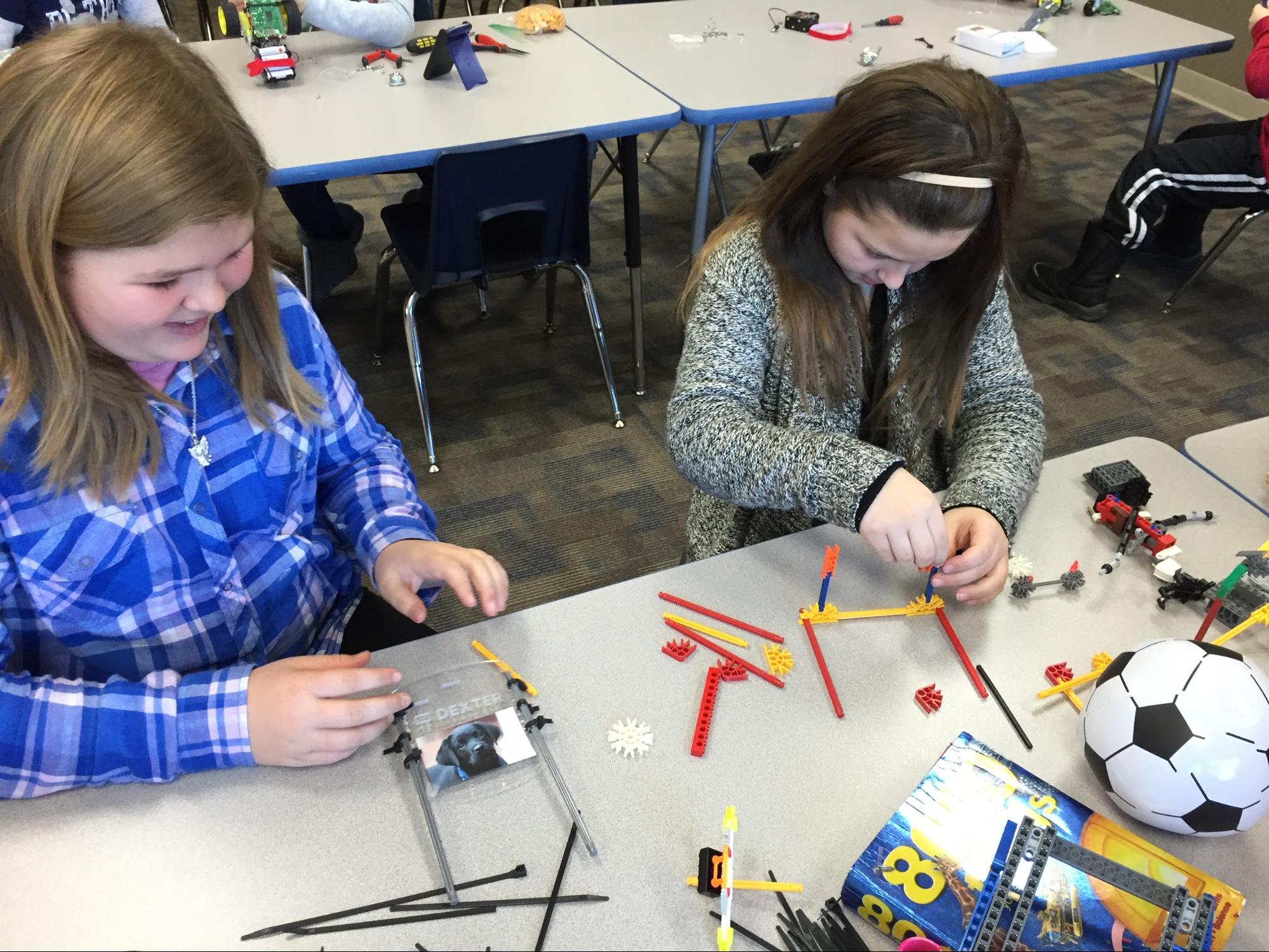
Makayla and Emily designing “arms” and attachment methods.

Adding Apparatus
The next challenge was designing and building “arms” to help control the ball. Without access to a 3D printer we chose to use commercially available building toys (Legos Technic and K’nex) to fasten prototype arms and test them. The GoPiGo comes with Lego-compatible holes in its body for such additions (zip ties were also very handy).
Next Steps
We have now begun exploring mounting Raspberry Pi cameras (we modified Dexter Industries sensor mounts), ultrasonic sensors, bluetooth controls and other peripherals to add/improve functionality.
This proved to be an engaging, challenging and fun exploration for the students.
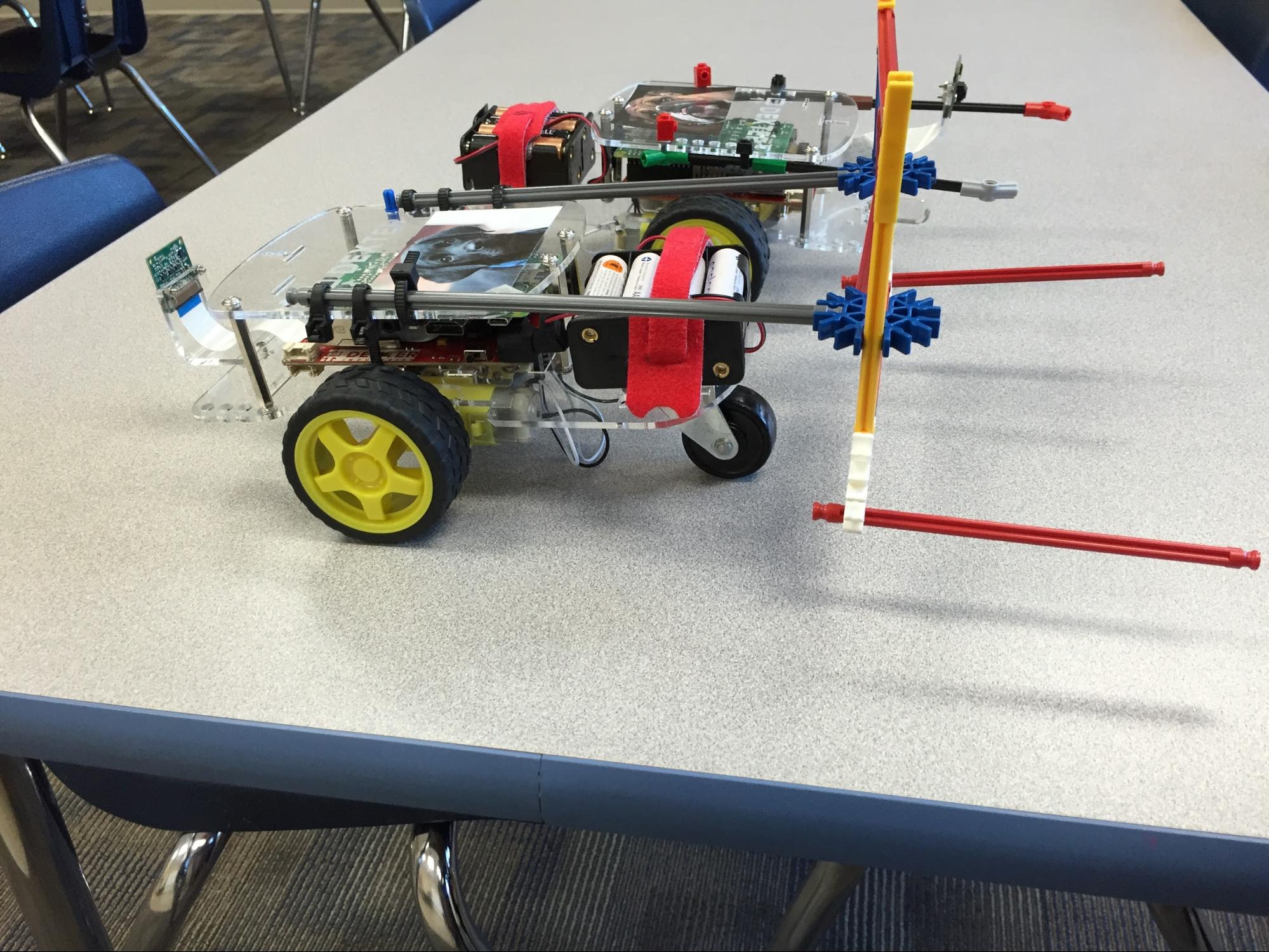
GoPiGo Robotic Soccer Players Finished!
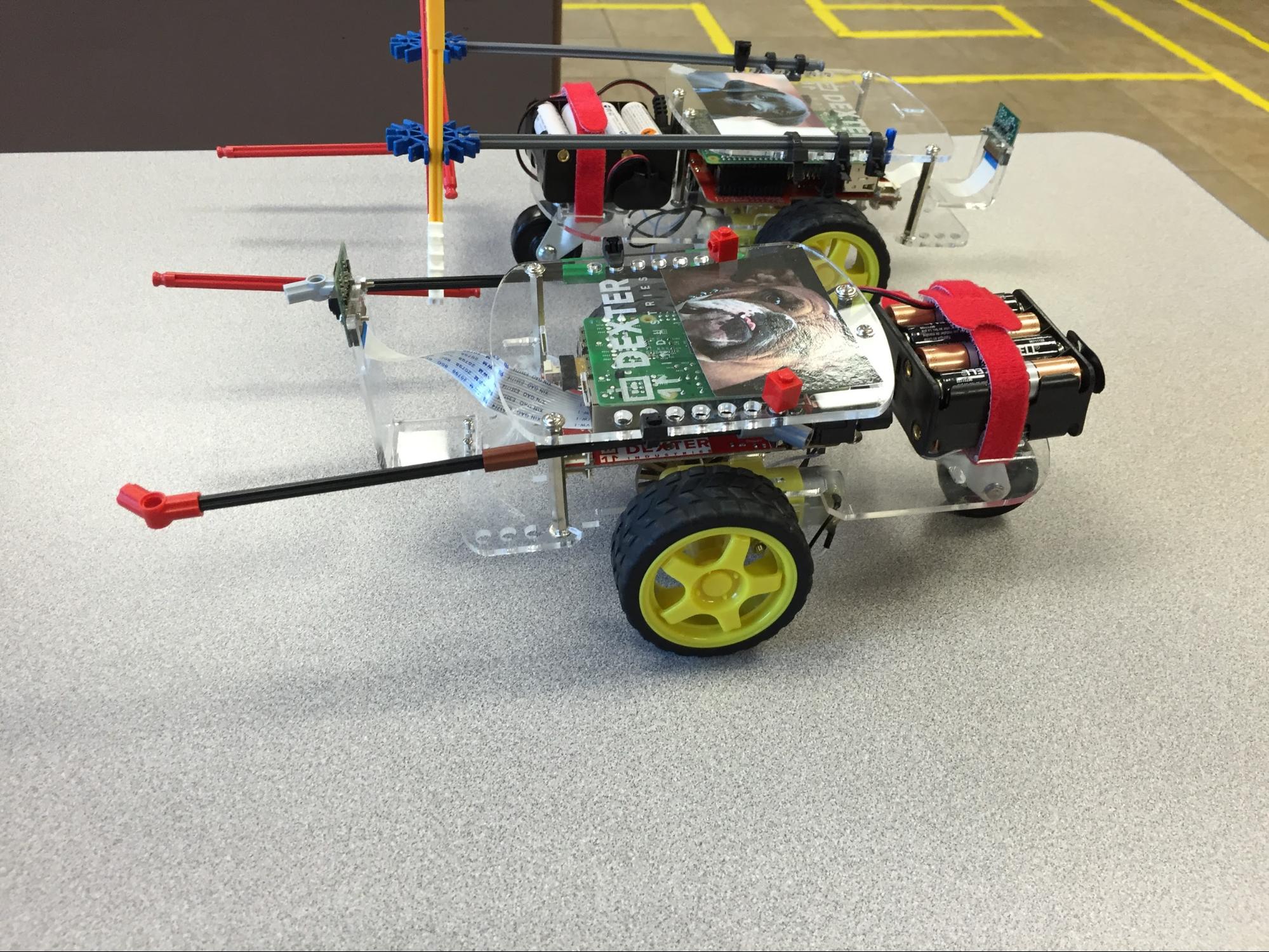
Introducing Cros-Lex Elementary Technology’s BULLDOG, a GOPIGO Soccer ‘bot.



A Final Note
DIVE IN, don’t let fear or inexperience stop you.
Learn with your students. They need to see that we all learn throughout life. The support is out there. You can do it and it will be fun for you and your students.
They won’t even notice they are learning!
Learn with your students. They need to see that we all learn throughout life.
Have a project you want to share with us? Contact us and let us know!
Related Articles


{kind=link}
0 Comments
Leave a reply
You must be logged in to post a comment.