We’re releasing an update to Raspbian for Robots and this one is based on Buster !
This update makes Raspbian for Robots Raspberry Pi 4-compatible out of the box/download. We’ve taken the opportunity to make some changes to how we pre-install all the tools that make Raspbian for Robots an ideal OS for running the Dexter Industries robots.
- Supported robots: GoPiGo3, BrickPi3, GrovePi and PivotPi
- Easier to connect to your home / school network
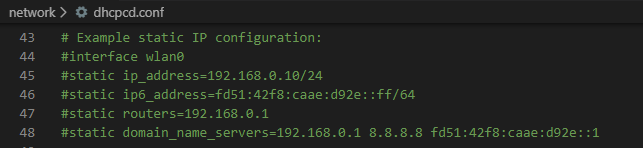
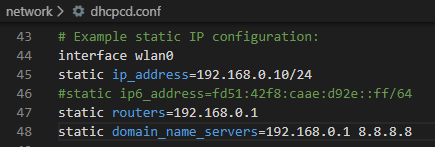
- Easier to assign a fixed IP address (IPv4)
- Moving to the native RealVNC server
- MariaDB is pre-installed should you want a database for your project (default installation)
Please consider this first Raspbian for Robots as being experimental. We’ve tested it as much as possible however there are so many possible combinations of sensors and boards that it’s hard to say we covered everything. This has passed our internal tests and we’re confident but these are big all-encompassing changes!

Supported Robots
The following robots are fully supported now, with a Pi2, Pi3 or a Pi4:
- GoPiGo3
- BrickPi3
- PivotPi
- GrovePi+
With this version of Raspbian for Robots, we’ve taken the decision to drop out-of-the-box support for the GoPiGo1 and the GoPiGo2.
What does this mean in practice?
- The libraries for the GoPiGo and GoPiGo2 are no longer pre-installed in Raspbian for Robots. None of those robots were sold with a Pi4 as the Pi4 didn’t exist at the time. We believe the number of users who will want to upgrade their GoPiGo2 to Buster is pretty low.
- Not having the libraries pre-loaded on the SD card means that newcomers to the GoPiGo3 will be warned early on if they try to run example code meant for the previous versions of the robot. We’re hoping it will be easier to help them to relevant tutorials. It’s a nice problem to have though, we’ll admit. Many tutorials out there are meant for all versions of our little GoPiGo. We love our community of users!
- The GoPiGo and GoPiGo2 libraries can be added manually and they still work! We’re not completely leaving our early adopters out. For those who want Buster on their GoPiGo2, it is still supported. Just run
curl -kL dexterindustries.com/update_gopigo | bash - The original BrickPi and the BrickPi+ were removed a couple of years ago, when we moved to Stretch. Again, they can be manually installed if needed:
curl -kL dexterindustries.com/update_brickpi_plus | bash
Connection to the Robot
We’ve taken the experience we learned from a couple of clients and are now offering this solution to everyone.
We moved the files that are necessary for networking into a folder that is reachable even before the first boot. Here is how you can set it up once you’ve done burning the Buster image via Etcher. While the SD card is still in your computer you should be able to reach the /boot/network folder. It contains the following files and folder as soft links. Thanks to Google Cloud Derby for this idea! 😍
- wpa_supplicant.conf file – which holds the network information.
- dhcpcd.conf
- interfaces
- interfaces.d folder
These files are what you need to set up your network under most circumstances. You will need to use a code editor, even a simple one like notepad++, or a more advanced one like Atom, or Code.
Connection to the Robot - Wifi
Connection to the wifi network
You will need to edit wpa_supplicant.conf to enter your wifi network name (ssid) and your network password (psk). There’s already a method in Raspbian to load up this information but it’s a transient one; on boot up, the file will be transferred and will no longer reside in the /boot folder. Our approach gives you permanent access to the file.
Uncomment the appropriate lines (5 to 9 in this screenshot) by removing the # sign at the beginning of each line, then fill in your network information.
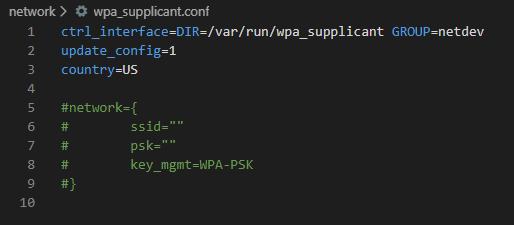
Before Editing
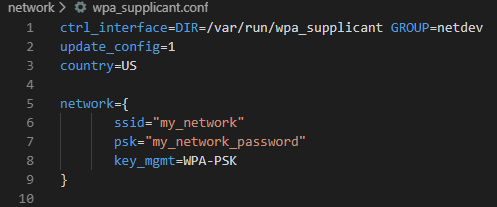
After Editing. Line coloring may differ.





{kind=link}