GoPiGo3 Technical Specifications
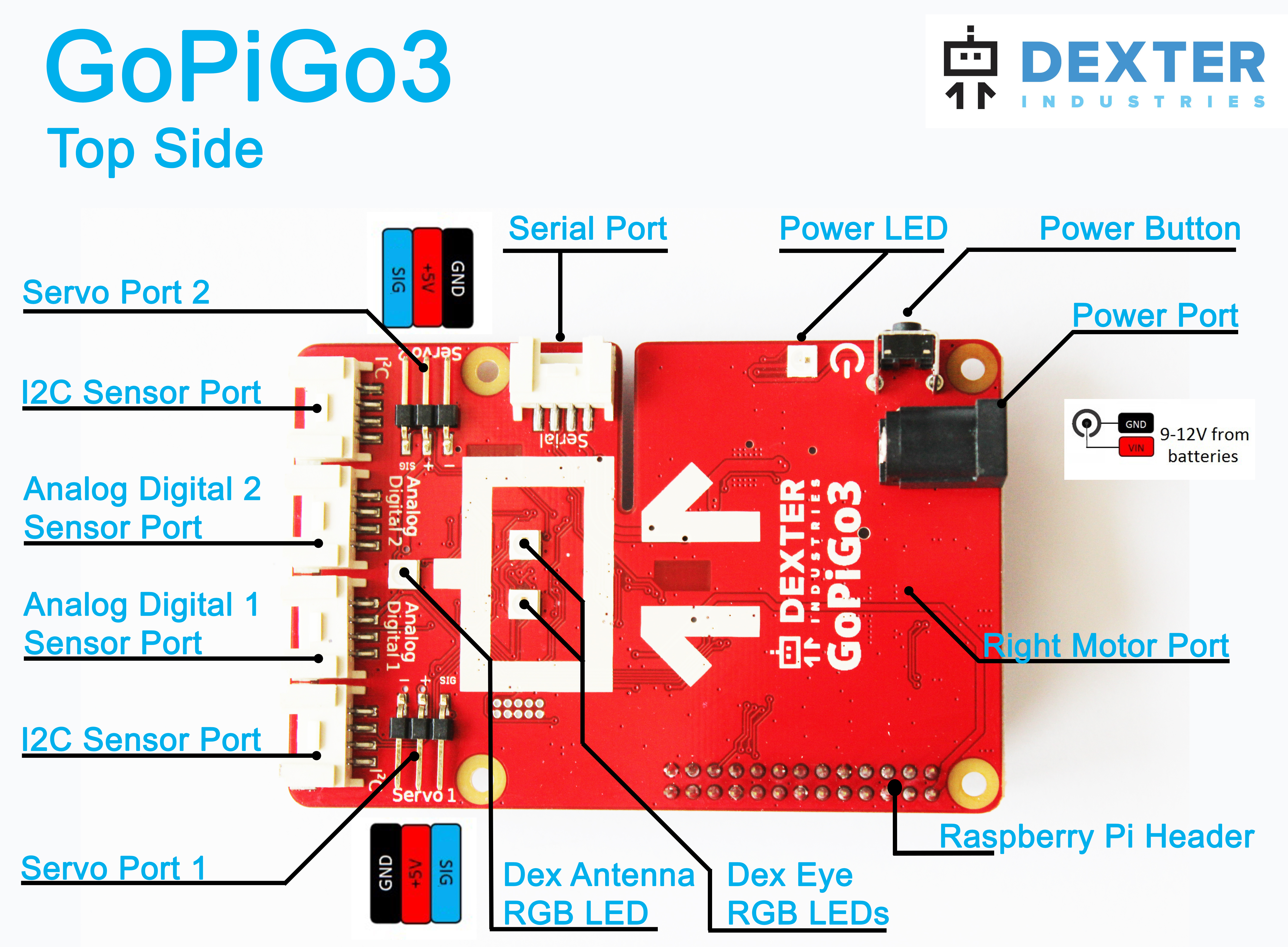
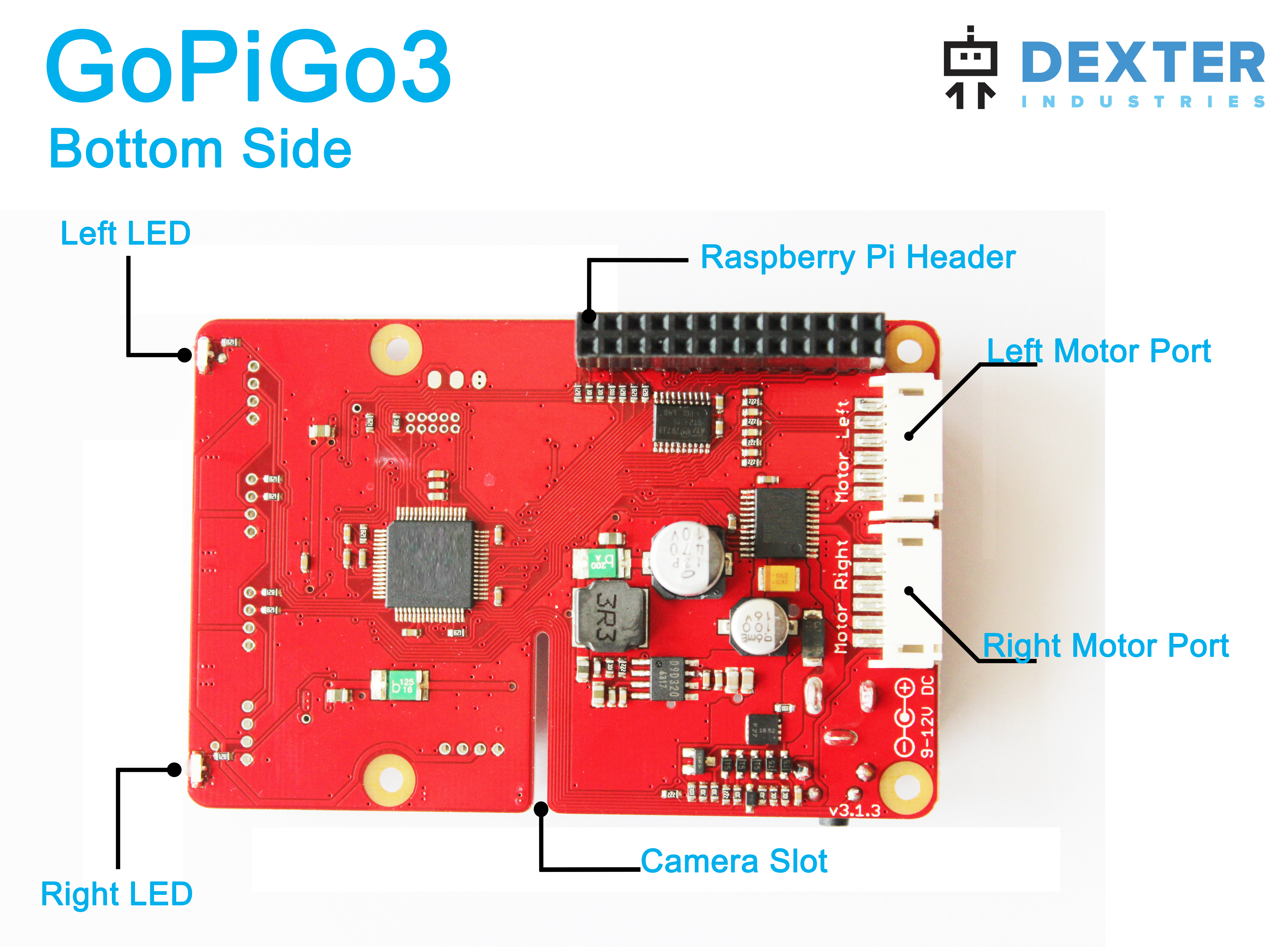
The GoPiGo3 is stacked with the Raspberry Pi without the need for any other connections. Communication with the GoPiGo3 board occurs over the SPI interface.
Sensor Connections: The GoPiGo3 has 5 Grove ports on it on which various Grove sensors can be connected.
- I2C Sensor Ports – The GoPiGo3 has two I2C sensor ports. These are connected directly to the Raspberry Pi board through a level conversion chip and connect to the same bus.
- Analog Digital Sensor Ports – These two ports can connect to Analog, digital, and I2C Grove devices. These are directly connected to the micro-controller on the red GoPiGo3 circuit board.
- Serial Port – This port is directly connected to the Raspberry Pi serial pins through a level conversion chip.
Servo Connections: The GoPiGo3 can control two servos. They are controlled by the micro-controller on the GoPiGo3 circuit board.
Power Port: The Power Port on the GoPiGo is a 5.5mm X 2.1mm barrel jack that can receive 9-12V DC center-positive power.
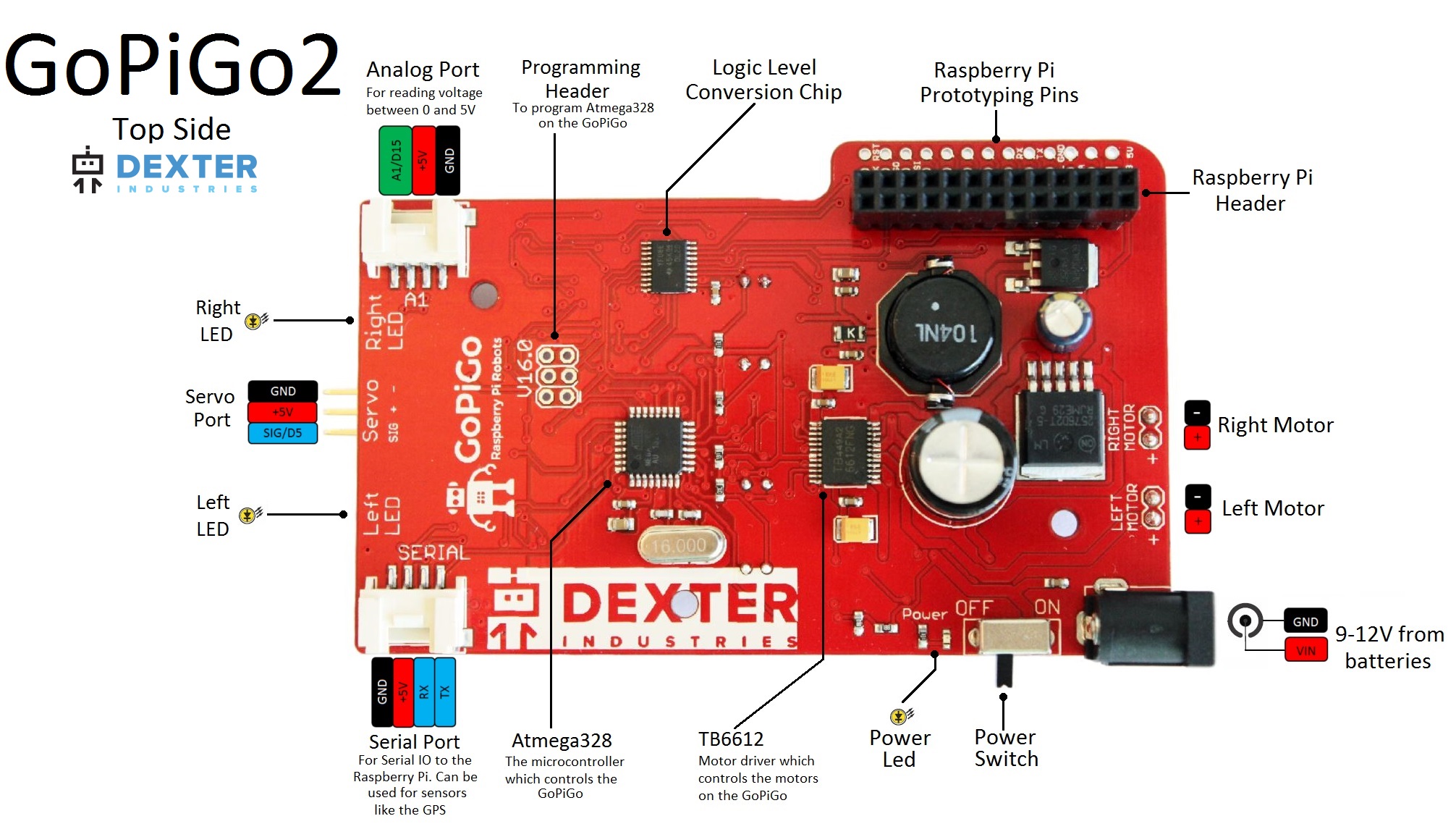
GoPiGo2 Technical Specifications
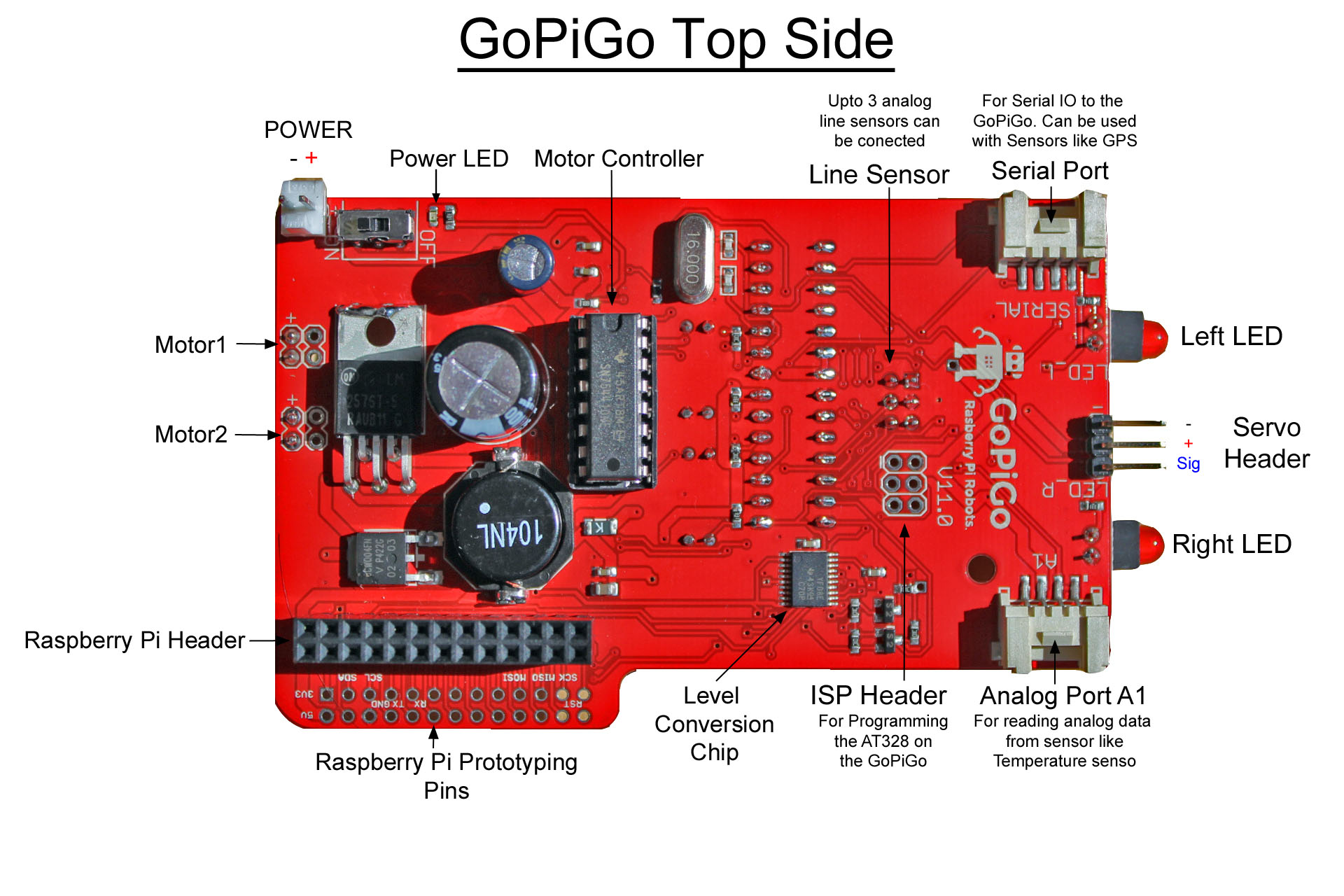
The GoPiGo2 is stacked on top of the Raspberry Pi without the need for any other connections. Communication between the two occurs over the I2C interface. You can connect motors and sensors to the GoPiGo.
The GoPiGo has 4 ports on it on which various Grove Sensors can be connected. There is an Analog, Digital, Serial and I2C port on the GoPiGo. There is also a connector to connect the Servo motors and another connector to connect upto 3 line sensors on the GoPiGo.
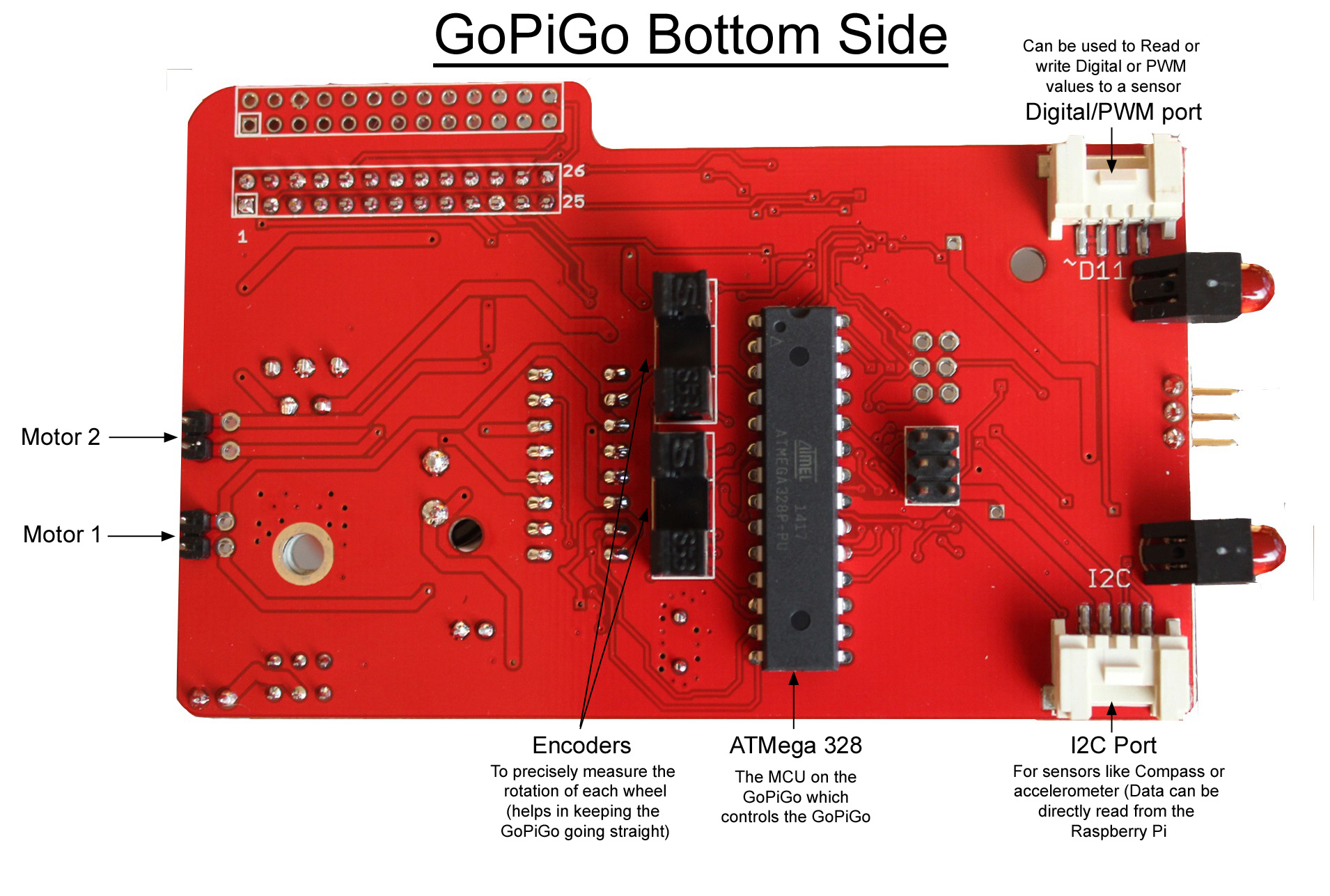
All the motor control and sensor I/O on the GoPiGo is done by an ATMEGA328 microcontroller on the GoPiGo. The microcontroller acts as an interpreter between the Raspberry Pi and the GoPiGo. It sends, receives, and executes commands sent by the RaspberryPi.
In addition, the GoPiGo allows you the Raspberry Pi to access some Grove sensors directly. The Raspberry Pi has an I2C Bus by which sensors connected to the I2C Ports can be directly accessed.
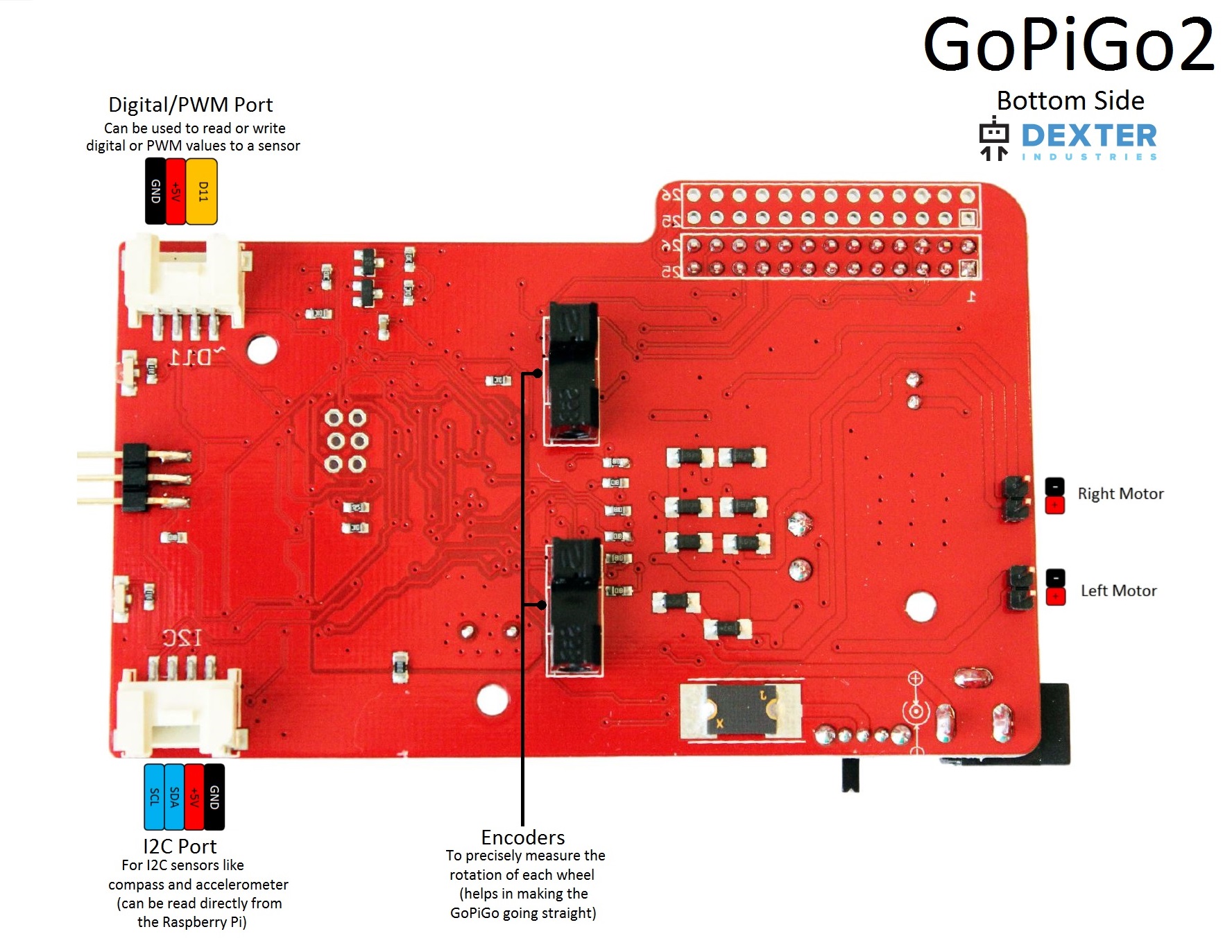
The GoPiGo has 2 optical encoders on the bottom side of the PCB that are used to track the movement of the wheels and help the GoPiGo move in a straight line.
Here is the port description for the GoPiGo2:
Have a question or a suggestion?
Ask on our forums here.