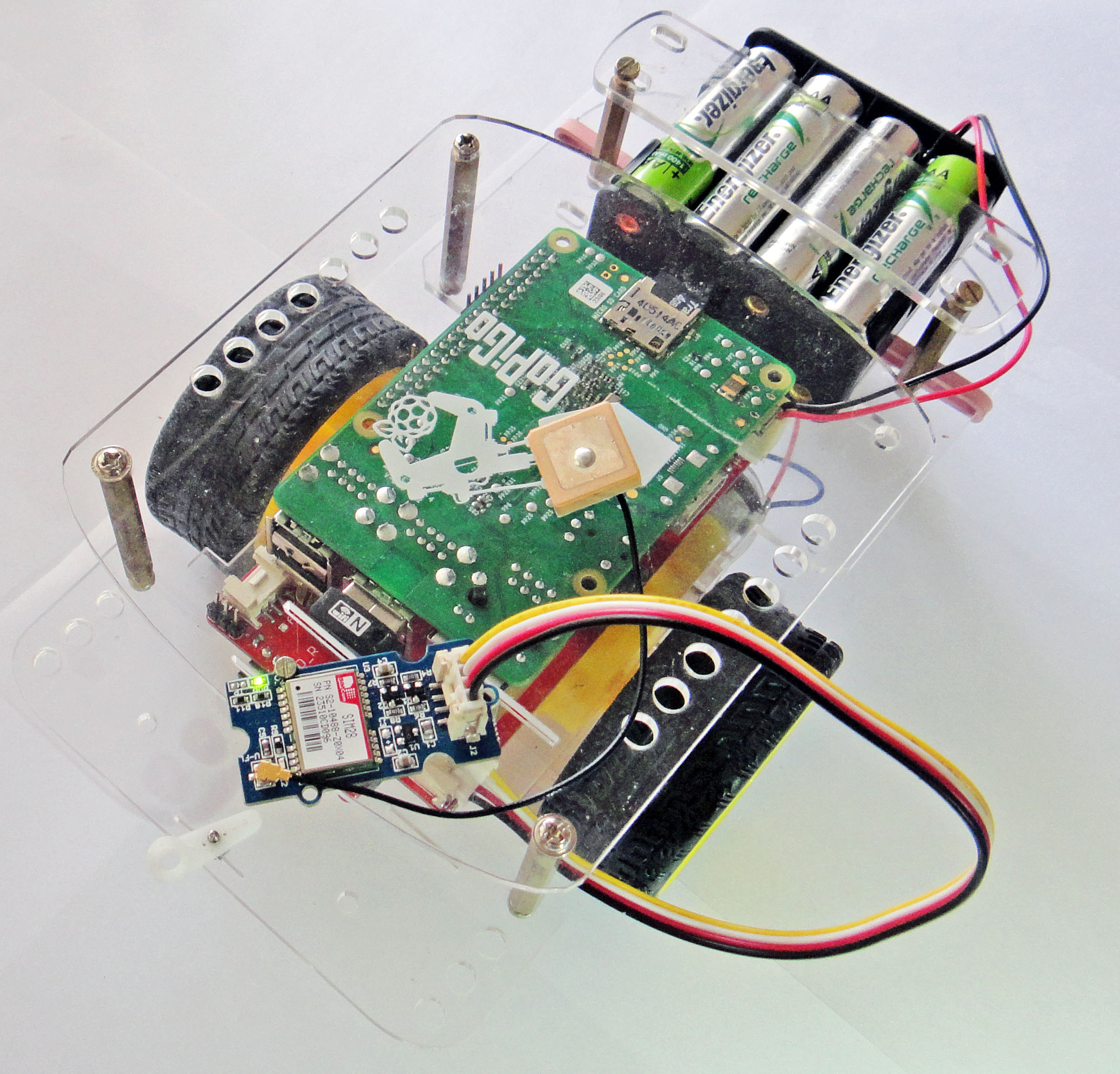
This is an advanced project with the GoPiGo. In this example we use a GPS sensor with the GoPiGo. Users can use the GPS data to program waypoints for the GoPiGo and create a GPS guided bot using the GoPiGo.
Hardware needed:
- A fully assembled GoPiGo
- A decent battery pack providing atleast 9V (recommended 12V battery pack of 8AA cells )
- Wifi Dongle for connecting and controlling
- Grove GPS sensor
Connecting the GPS
- Take a Grove connector and take out the yellow and white cables and cross them over, so that the connector is now “BRYW” from the original “BRWH” configuration.
- Now attach one end of the cable to the GPS and the other end to the Serial port on the top side of the GoPiGo
- Now fix the entire module on the top plate using screws and mounting holes
Setting up the GoPiGo
Make sure that the GoPiGo is set up properly and you have the updated software and firmware. If you are not sure about this, follow the guide here.
If the GoPiGo is properly set up, connect to the GoPiGo via SSH or VNC and open terminal.
Running the example:
- Go to the GPS bot example folder:
cd Desktop/GoPiGo/Software/Python/Examples/GPS Bot/

- Start the basic_robot_control.py example
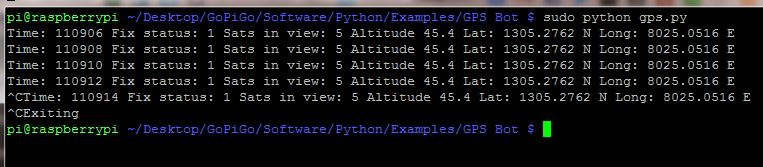
sudo python gps.py
The GPS will start streaming out data


You can easily adapt this example to any project that you have in mind with the GoPiGo and the GPS sensor.
Have a question? Go check out our support page here or post it on the forums here.